Technologie
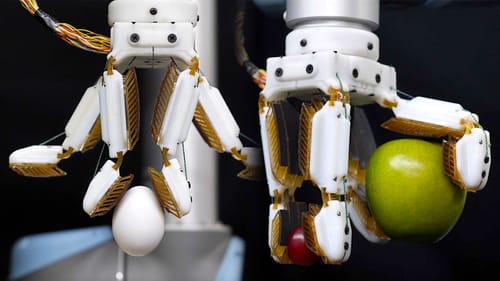
Une main robotique inspirée du gecko pour saisir aisément tout type d'objets (lourds ou fragiles)
L'un des défis majeurs dans la conception d'une main robotisée réside dans le fait de lui conférer suffisamment de souplesse de fonctionnement pour qu'elle puisse saisir des objets de différentes tailles et poids. Une main robotique humanoïde par exemple, confère généralement plus de précision